|
 
h/p/cosmos®
coscom®
v4
treadmills & ergometers interface communication protocol
Basic Remote Service Created for: h/p/cosmos sports &
medical gmbh Am Sportplatz 8
DE 83365 Nussdorf-Traunstein
Germany
phone + 49 86 69 86 42 0 fax + 49 86 69 86 42 49
email@hpcosmos.com
www.hpcosmos.com
Authors:
M. Sc. Andreas Feil,
Altotec Hard- und
Software GmbH Altofing 7, 83367 Petting / Germany
Franz Harrer, CEO &
President h/p/cosmos sports & medical gmbh
Am Sportplatz 8, DE 83365
Nussdorf-Traunstein
published:
www.coscom.org
article #: cos100115v4 date: 2020-03-13
© Copyright 2020-2025 h/p/cosmos sports & medical gmbh
As a contribution to
h/p/cosmos' efforts for development and updating the coscom protocol, all users
of the coscom protocol and coscom features are obliged to list the name and
company logo h/p/cosmos®
and the copyright of h/p/cosmos®
in their software
menu and their user/operation manual on a well visible position.
download:
20210212_cos100115-v4_hpcosmos_coscom_v4_dll_V1.1.0.0.zip
download:
20201012_hpcosmos_betaversion_test_1.0.0.0_coscom_v4_Tutorial.zip
[1] UserTerminals and
Micro-Controller-Units MCU1 up to MCU6
The various MCU
(MicroControllerUnit) generations of the h/p/cosmos devices, such as treadmills,
bicycle and ladder ergometers:
 |
 |
 |
Figure 1: MCU1,
built from 1988…1991
order # MCU1: MCU1 order # UserTerminal:
interface: no external interface
coscom: no
firmware update: in factory only |
Figure 2: MCU2, built from
1991 … 2001 order # MCU2 PCB: cos255a0225 order # UserTerminal:
cos10498 interface: RS232 COM1
coscom: v1 and v2 firmware update: via EPROM |
Figure 3: MCU3, built from
1996 … 2001
order # MCU3 PCB: order # UserTerminal: interface: 2 x
RS232 COM1 and COM2 coscom: v2
firmware update: via RS232 upload |
|

|

Figure 4: UserTerminal with MCU4 built from
1997 … 2007 article # UserTerminal MCU4: cos00098110046 article #
MCU4 PCB: cos25500000336 interface: 2 x RS232 COM1 and COM2
coscom: v2 and v3 firmware update: via EPROM |
Figure 5: UserTerminal with MCU5 built from
2007 … 2021 article # UserTerminal MCU5: cos100060 article # MCU5
PCB: cos13745-03tm interface: 4 x RS232 COM1, COM2, COM3, COM4
(option) coscom: v2 (terminated in 2019) and v3 and v4 firmware
update: via RS232 upload via para control 4.1 |
Checking the firmware version can be done either via coscom v3 or on the
UserTerminal display of the treadmill (or through h/p/cosmos para control
software and interface, in case there is no display on the treadmill:
1)
After the machine is powered on, the display shows the Firmware version. or

2) When activating the user OPTION 05, the display also shows the Firmware
version. |
display: | shows: | |
speed | HPTM (TM = treadmill), or
HPLE (LE = ladder ergometer | |
time | type | |
index | 1.7 = example for device code in
Optional settings (see nameplate) | |
distance | MCU5, or MCU4 | |
elevation | 1.06.4 (example for
firmware version) | | heart
rate | 1.7 (default device code based on
firmware, which should match the device code on the type plate
of the treadmill) |
For clarification a short
table of available coscom versions on different MCU versions: |
MCU2 | MCU 3 | MCU 4 |
MCU 5 | MCU 6 |
coscom v1 | x | X | | | |
coscom v2 | | | x | | |
coscom v3 | | | 4.04.5 or higher |
x | | coscom v4 | | | |
1.08.3.0083 and higher | x |
MCU4 Firmware updates are available at h/p/cosmos headquarter through EPROM
replacement. From MCU5 (built from November 2007 approx.) the h/p/cosmos
treadmills have been equipped then with MCU5 where the firmware can be updated
via RS232 interface. Please send an email to
service@hpcosmos.com with the serial number of the treadmill based on the
type plate and check the installed firmware version (will also be shown on the
treadmill display for a few seconds after powering on the machine) and ask for
details in case of any queries.

Figure 6: UserTerminal MCU6 and TouchScreen Figure 7:
MCU6: Figure 8: SBC PC: UserTerminal with
MCU6 GUI Graphic User Interface Windows 10 OS 10.1”
TouchScreen built from 2019 … article # UserTerminal MCU6: cos101000
article # MCU6 PCB: cos101010-01 article # SBS PC: cos101000i
interface: 1 x RS232 COM1, NFC, RFID, USB, LAN, BlueTooth via USB stick,
WiFi via USB stick coscom: v4 (no more other protocols!)
firmware update: via USB memory stick The main components of the GUI
UserTerminal are the MCU6 sensor actor board and the SBC single board computer
with Windows 10, featured by a 10.1” TouchScreen and number of peripheral
devices.
[2] Overview
h/p/cosmos coscom v4 defines an interface for basic device control. At the
moment, the protocol is designed for five different device types (not all are
available on the market right now):
- h/p/cosmos running machines (treadmill
ergometers)
- h/p/cosmos ladder ergometers
- h/p/cosmos ergometers
-
h/p/cosmos steppers
- h/p/cosmos cross trainers
The interface consists of one device which currently has one service (index 0).
The service has several actions and variables with which the device can be
controlled. In future, there could be an update which can add new services if
necessary. Device Service
•Actions •Variables Future services...
The protocol has a general request – response design. External software is
always allowed to send a request but must wait for the corresponding answer
before sending the next request (only one message can be pending). For active
control see chapter safety considerations.
In order to get actual variable
values, you can either query the latest value of a variable (so called polling)
or get an automatic event message, when the variable value changes (see chapter
eventing).
h/p/cosmos coscom v4 uses serial interface for communication. In
order to distinguish between version 3 the baud rate is changed to 19200.
[3] coscom® safety test confirmation and official release document
Please note that for staying in compliance with safety related issues a quality
assurance & regulatory affairs agreement is necessary. This states that a
communication test including log files have to be done. For further information
see official document on coscom.org. Current version can be found at:
20210924_hpcosmos_coscom_v4_QA_RA_sample.docx
[4] Basic message format
h/p/cosmos coscom v4 is a UTF-8 based protocol. Every message starts with “*”
followed by a
character which indicates the message type:
· “*A” indicates an action request or response.
Parameters are described with “*I” for input parameters followed by
a parameter index and “:” as delimiter for the parameter value.
Output parameters follow the same scheme but with character “O”.
Example request: *A0s0*I0:<FirstParameterValue>*I1:<SecondParameterValue>*Y0:8D*Z
· “*Q” followed by a variable index
indicates a variable query request or response: o
Request example for variable with index 0
on service index 0: *Q0s0*Y0:4E*Z
o Response example for a variable with index
0 on service index 0:
*Q0s0:<CurrentValue>*Y0:E2*Z
o Querying variables which are not supported by current device type will
result in an error response. ·
“*E” indicates an event message. For further information see
chapter “eventing”. · “*R”
is a special response message this is sent when a wrong checksum was detected.
See chapter error messages for details. After the “main” character
follows the service index “s” + index of service. Currently there is only
one
service defined, so this will always be “s0”. A coscom v4 device will
accept messages where no service index is defined (missing “s0”). If this is the
case a default service index of 0 is assumed. A device is also allowed to send
messages with missing “s0” service index.
Every h/p/cosmos coscom v4 message
ends with the checksum extension followed by “*Z”.
The “*”
character is reserved as protocol delimiter therefore any “*” in an argument or
variable value must be escaped with “*X”. Example: If you want to send a
message with “RequestControl” action which contains a “*” character, you would
have to escape it: *A3s0*I0:My own text with a *X
character*Y0:09*Z h/p/cosmos coscom v4 defines a max. message length
for incoming requests (external software to device) of 64 bytes and a max
message length of 250 bytes for outgoing message.
[5]
Checksum extension Every coscom v4 message must use the checksum
extension. This is necessary because of RS232 support, where no data link layer
exists. request example: *A2s4*I0:2*I1:3*I2:0*Y0:73*Z
response example: *A2s4*Y0:44*Z The calculation of the
checksum is done by getting all UTF-8 bytes for the characters starting by the
first ‘*’ character of the message and ending before the message end “*Z”. The
bytes have to be added and computed modulo 256. The hexadecimal representation
of the result is the actual checksum.
[6] Error messages A
h/p/cosmos device waits till it receives a “*Z” indicating that a whole coscom
message was
received. If this part of the message is disturbed the external
software will run in a timeout.
If a h/p/cosmos device detects a “*Z” it
parses the checksum of the received message. If no
checksum is attached or
an invalid checksum is detected it will send a general error response
*R1*F0:<ErrorNumber>*R1:<ErrorText>*Y0:84*Z. The error description
(“*F1:Errortext”) is optional and can be left out.
If an h/p/cosmos device detects a wrong parameter (e. g. speed out of range) in
an otherwise correct message it will send an error response message to the
external software. An error message starts with the same Indices as the request
but is followed by a “*F0:”, an error number, “*F1:” and an
error
description. An example looks like this:
*A0s0*F0:123*F1:ErrorText*Y0:38*Z
The error description (“*F1:ErrorText”)
is optional an can be left out.
[7]
Eventing For getting variable changes you can either use polling
method be querying the current variable values. This is according to the general
request -response design of the protocol. If you want to get automatic messages
of the device, if variable values change, you can use so called eventing. This
an extension of the protocol where the device sends messages without an explicit
request. You can use action “SetEventMask” to control which variables should
send automatic changes (default after switching device on: all off).
RS232
does not allow for discovering connection change therefore event mask could be
set to any value when you are connecting. A precursor could have set it
according to his needs. Best practice is to set event mask at connecting time to
your needs (if you don’t want any events, set all off.)
A service publishes
changes to its variables by sending so called event messages. These messages
contain the indices of one or more variables and the current value of those
variables. There can be more than one value in a single event message, if more
variables change at the same time.
An initial event message is sent when
subscription changes by “SetEventMask”. This event message contains the indices
and values for all evented variables and allows the subscriber to initialize its
model of the state of the service.
Event messages are tagged with an event
key, which has one digit. The event key for a subscription is initialized to 0
when the device sends the initial event message. For each subsequent event
message, the device increments the event key for a subscription, and includes
that updated key in the event message. Event keys handle overflow and wrap the
event key from 9 back to 1 (not 0). Subscribers must also handle this special
case when the next event key is not an increment of the previous key.
To
repair an event subscription, e.g., if a subscriber has missed one or more event
messages, a subscriber must re-subscribe by invoking “SetEventMask” again. By
doing so, the subscriber will get a new initial event message, and a new event
key.
Following the general event syntax (for better reading the elements are put
in separate lines): *Eevent keysservice
index *Vvariable index:variable
value other variables and their values go here, if any
*Y0:xx*Z An actual example message with event key
1 and two variable updates (Index 0 and
1) of service 0
would look like this:
*E1s0*V0:<value1>*V1:<value2>*Y0:A9*Z
[8] Safety considerations One goal was making
h/p/cosmos coscom v4 more secure. h/p/cosmos coscom v3 has several safety
features. But not all of them were mandatory. Over the last years regulations
for medical devices have become more severe. In order to meet these concerns
h/p/cosmos has changed some safety features and made them mandatory. Following
the basic safety procedure of h/p/cosmos coscom v4 will be described.
[8A] GetDeviceInformation In order to check if
a h/p/cosmos coscom v4 device is present, you must use action
“GetDeviceInformation”. You will get device type, the variant (distinguish
between treadmill, ladder ergometer, bicycle and stepper), serial number and
firmware version of the connected device. [8B]
Request control – fail-safe and stop state An external device can
send a h/p/cosmos coscom v4 message at any time. But before actively controlling
the device by changing any load (speed, elevation, power, start or stop command)
you first must request control allowance by using action “RequestControl”. With
MCU6 devices this can be done anytime, MCU5 devices must be in mode selection
state. After invoking this action, the user will see a message on the user
terminal (if device hardware supports displaying text) where he must
confirm
external control allowance. If he accepts, variable “ControlAllowed” will change
to “Allowed”
if he declines the request, “NotAllowed” will be set. While the
request is shown “RequestPending” will be set. If it’s a device without
terminal, the message will not be shown and control will be granted immediately.
You can only actively control the device when “ControlAllowed” is set. Control
is then generally allowed as long as control state “stopped” or “pause” is
reached. This could be by pressing the stop button on the terminal, a failsafe,
an error or sending stop action on coscom v4.
If the device supports control
state “pause” external control will also be revoked and the external software
would have to request control again. This “pause” state is optional and
depending on the actual device. “Pause” cannot be achieved due external command.
Sending the “Stop” action will set control state to “stop”.
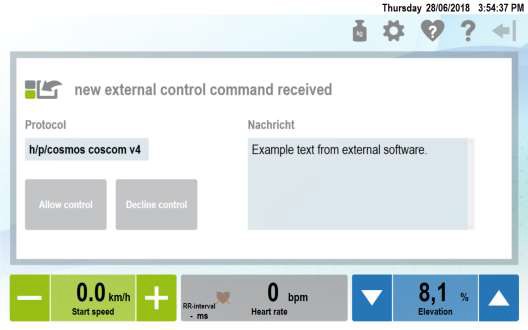
Figure 9: Example of request control on MCU 6 If variable “ControlAllowed”
changes to “NotAllowed” external software must cancel current control
profile. In order to start controlling again, you have to repeat requesting
control.
While external control is allowed, using Failsafe for detecting
communication loss is mandatory. You have to invoke action “SetFailsafe” within
every second while controlling the device. If the device does not receive the
message within one second, the device will stop and control will be revoked.
This concept ensures that a stop state of the device is “detected” (by getting
an error response to an active control request) by external software even if
variable “ControlState” is not monitored.
For a small state chart see
variable “ControlAllowed”.
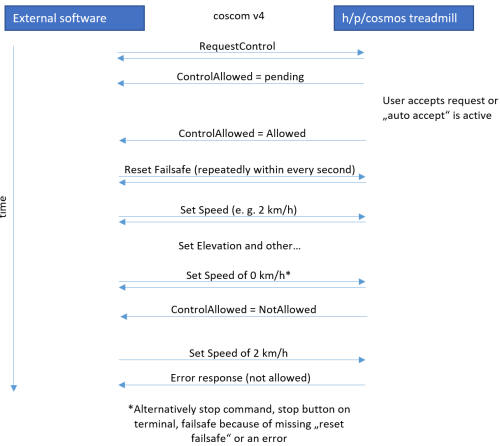
Figure 10: Communication example
For a small state chart see variable “ControlAllowed”.
[9] Feature Matrix h/p/cosmos
coscom v4 is designed to meet different device types. But not all device types
support all defined actions and variables. Following matrix will address this
issue:
Action/Device type | Treadmill |
Ergometer | Ladder | Cross
trainer | Stepper |
GetDeviceInformation | x |
x | x | x |
x | SetEventMask |
x | x | x |
x | x |
RequestControl | x | x |
x | x | x |
ResetFailsafe* | x |
x | x | x |
x | SetSpeed* |
x | | x | | |
GetSpeedRange | x | |
x | | | GetAccelDecelRange |
x | | x | | |
HoldSpeed* | x | |
x | | | SetElevation* |
x | | | | |
SetElevationWithSpeed* | x | | | | |
GetElevationRange | x | | | | |
HoldElevation* | x | | | | |
SetPower* | | x | |
x | x |
SetTorque* | | x | |
x | x |
SetCadence* | | x | |
x | | Start* |
x | x | x |
x | x | Stop* |
x | x | x |
x | x |
SetPersonData* | x |
x | x | x |
x | GetPersonData |
x | x | x |
x | x |
ResetCounterValues* | x |
x | x | x |
x | Beep* |
x | x | x |
x | x |
*
Using this action without external control permission will result in an
error response (see chapter “Safety considerations”).
Variable/Device type | Treadmill |
Ergometer | Ladder | Cross
trainer | Stepper |
ControlStatus (Index: 0) |
x | x | x |
x | x |
ControlAllowed (Index: 1) |
x | x | x |
x | x |
ActualSpeed (Index: 2) |
x | x | | x | |
TargetSpeed (Index: 3) |
x | x | | x | |
ActualElevation (Index: 4) |
x | | | | |
TargetElevation (Index: 5) |
x | | | | | ActualPower
(Index: 6) | x |
x | x | x |
x | TargetPower
(Index: 7) | | x | |
x | x |
ActualTorque (Index: 18) | |
x | | x | |
TargetTorque (Index: 19) | |
x | | x | |
EnergyConsumption (Index: 8) |
x | x | x |
x | x | MET
(Index: 9) | x |
x | x | x |
x | Time (Index: 10) |
x | x | x |
x | x |
Distance (Index: 11) |
x | x | x |
x | | ActualCadence
(Index: 12) | | x | |
x | | TargetCadence
(Index: 21) | | x | |
x | | Height
(Index: 13) | x | |
x | | x |
HeartRate (Index: 14) |
x | x | x |
x | x |
RRInterval (Index: 15) |
x | x | x |
x | x |
Errors (Index: 16) | x |
x | x | x |
x | StepHeight
(Index: 20) | | | x | |
x |
[10] Actions
Following you will find a short description with syntax sample of every
coscom v4 action of basic remote service. Note: If no
other description is given, values are defined as floating point values expected
with max. six decimal places and maximal value +/- 1.000.000. Integer values are
defined as signed 32-bit values. String values max.
[9A] GetDeviceInformation (Action index: 0)
Gets basic device information for detecting if a h/p/cosmos coscom v4 device is
available.
Parameters: -
DeviceType (direction out - index 0, max. length: 64 characters ):
e. g. urn:schemas-coscom-org:device:LadderErgometer:1
If returned device type is “urn:schemas-coscom-org:device:MCU5coscomV4:1”
restrictions described in section “MCU5 legacy device” apply.
- Variant (direction out- index 1, digit): Number that indicates the
actual variant type. Possible Values: o
0 = Treadmill Ergometer o 1= Ladder
o 2 = Cross trainer o
3 = Stepper o 4 = Bicycle Ergometer
- Serial Number (direction out – index 2, max. length:
50 characters): serial number string -
FirmwareVersion (direction out – index 3, max. length: 11 characters):
Current firmware version Syntax sample request:
*A0s0*Y0:3E*Z Syntax sample response:
*A0s0*O0:urn:schemas-coscom-
org:device:MCU6coscomV4:1*O1:1*O2:cos30007-01va06-0003*O3:1.0.0001*Y0:8A*Z
[10B] SetEventMask (Action index: 1) As
described in chapter “eventing” with this method it is possible to enable or
disable automatic value change transmission of the device. After switching on
the device all events are disabled. Changing the event mask will lead to new
initial events and new event index in the event messages (see chapter
“eventing”). Parameters - EventMask
(direction in – index 0): a string consisting of 0 and 1 indicating if eventing
for specific variables should be turned on. The position in the string
determines the variable index. For example, the string 100101 enables eventing
for variables with indices 0, 2 and 5. Leading 0 can be left out. The string
starts with the highest variable index and ends with index 0. For variable
indices see chapter variables. For variable indices which are not supported in
the current device type changes to event mask will have no effect.
Syntax sample request: *A1s0*I0:1001*Y0:DE*Z
Syntax sample response: *A1s0*Y0:3F*Z
[10C] RequestControl (Action index: 2)
With this action external control can be requested. It must be done before
actively controlling the device. For further information on controlling the
device see chapter “Safety considerations”. With MCU6 this action can be invoked
anytime. MCU5 devices must be in selection or pause state. Otherwise MCU5 will
send an error response. Parameters -
Message (direction in – index 0, max. length: 45 characters): a string
which will be shown to the user when he should accept external control. Because
of different hardware types it is not guaranteed that the message
is shown to the user. If no message should be shown, enter an empty string
(request: *A2s0*I0:*Y0:1D*Z) Syntax sample
request: *A2s0*I0:external software name wants to
control*Y0:3D*Z Syntax sample response:
*A2s0*Y0:40*Z [10D] ResetFailsafe
(Action index: 3) This action must be invoked regularly within 1
second while external control is allowed. For more information see chapter
“Safety considerations”. If the action is invoked when controlling is not
allowed an error response will be sent back from the device (see chapter “error
messages”). Parameters No parameters defined
Syntax sample request: *A3s0*Y0:41*Z Syntax
sample response: *A3s0*Y0:41*Z
[10E]
SetSpeed (Action index: 4) With this action you can set a new
speed with given acceleration. Using this action without external control
permission will result in an error response (see chapter “Safety
considerations”). If speed or acceleration parameter is out of range, an error
response will be sent. Parameters -
Speed (direction in - index 0): The new target speed in m/s.
- Acceleration (direction in – index 1): The
acceleration to be used with this command in m/s². Syntax sample
request (speed: 1.3 m/s, acceleration 0.2 m/s²):
*A4s0*I0:1.30*I1:0.20*Y0:7F*Z Syntax sample response:
*A4s0*Y0:42*Z
[10F] GetSpeedRange
(Action index: 5) Returns the current speed range of the device. The range
can vary from its base value if it is additionally limited in the option
settings of the device. Parameters -
MinimalSpeed (direction out - index 0): Current minimal speed in m/s.
- MaximalSpeed (direction out – index 1):
Current maximal speed in m/s. Syntax sample request:
*A5s0*Y0:43*Z Syntax sample response (min 0 m/s,
max 6.11 m/s): *A5s0*O0:0.00*O1:6.11*Y0:8E*Z
[10G] GetAccelDecelRange (Action index: 6)
Returns the current acceleration/deceleration range of the device. The range can
vary from its base value if it is additionally limited in the option settings of
the device. Parameters -
MinAcceleration (direction out - index 0): Current minimal
acceleration/deceleration in m/s². -
MaxAcceleration (direction out – index 1): Current maximal
acceleration/deceleration in m/s². Syntax sample request:
*A6s0*Y0:44*Z Syntax sample response (min 0.1
m/s², max: 0.6 m/s²): *A6s0*O0:0.10*O1:0.60*Y0:8E*Z
[10H] HoldSpeed (Action index: 7) Can be
used to hold the current speed at a constant level. Using this action without
external control permission will result in an error response (see chapter
“Safety considerations”). Parameters No
parameters defined Syntax sample request: *A7s0*Y0:45*Z
Syntax sample response: *A7s0*Y0:45*Z
[10I] SetElevation (Action index: 8)
With this action you can set a new elevation. Using this action without external
control permission will result in an error response (see chapter “Safety
considerations”). If elevation parameter is out of range, an error response will
be sent. Parameters - Elevation
(direction in - index 0): The new target elevation in %. Syntax
sample request (elevation: 3.3 %): *A8s0*I0:3.30*Y0:E7*Z
Syntax sample response: *A8s0*Y0:46*Z
[10J] SetElevationWithSpeed (Action index: 18)
With this action you can set a new elevation with optional elevation speed.
Using this action without external control permission will result in an error
response (see chapter “Safety considerations”). If elevation parameter is out of
range, an error response will be sent. Parameters
- Elevation (direction in - index 0): The new target elevation in %.
- ElevationSpeed (direction in – index 1):
The elevation speed to be used with this command in °/s. If the device does not
support elevation speed, this parameter will be ignored. To use the default
elevation speed, set this parameter to 0. Syntax sample request
(elevation: 3.3 %, speed: default):
*A18s0*I0:3.30*I1:0*Y0:26*Z Syntax sample response:
*A18s0*Y0:77*Z
[10K]
GetElevationRange (Action index: 9) Returns the current
elevation range of the device. The range can vary from its base value if it is
additionally limited in the option settings of the device.
Parameters - MinimalElevation (direction out - index 0):
Current minimal elevation in %. -
MaximalElevation (direction out – index 1): Current maximal
elevation in %. Syntax sample request:
*A9s0*Y0:47*Z Syntax sample response (min: 0 %,
max: 22 %): *A9s0*O0:0.00*O1:22.00*Y0:BE*Z
[10L] HoldElevation (Action index: 10)
Can be used to hold the current elevation at a constant level. Using this action
without external control permission will result in an error response (see
chapter “Safety considerations”). Parameters No
parameters defined Syntax sample request: *A10s0*Y0:6F*Z
Syntax sample response: *A10s0*Y0:6F*Z
[10M] SetPower (Action index: 11) Can be
used to set a new target power. Using this action without external control
permission will result in an error response (see chapter “Safety
considerations”). Parameters - Power
(direction in - index 0, integer): New target power in watts.
Syntax sample request: *A11s0*I0:50*Y0:B2*Z
Syntax sample response: *A11s0*Y0:70*Z
[10N] SetTorque (Action index: 16) Can be
used to set a new target torque. Using this action without external control
permission will result in an error response (see chapter “Safety
considerations”). Parameters - Torque
(direction in - index 0): New target torque in nm. Syntax sample
request: *A16s0*I0:6.50*Y0:1B*Z Syntax sample
response: *A16s0*Y0:75*Z
[10O]
SetCadence (Action index: 17) Can be used to set a new target
cadence. Using this action without external control permission will result in an
error response (see chapter “Safety considerations”).
Parameters - Cadence (direction in - index 0, integer):
New target cadence in rpm. Syntax sample request:
*A17s0*I0:80*Y0:BB*Z Syntax sample response:
*A17s0*Y0:76*Z
[10P] Start
(Action index: 12) Starts external control mode. Using this action without
external control permission will result in an error response (see chapter
“Safety considerations”). In order to start external control after getting
permission you can either set a new target value (speed, elevation or power) or
use this action to only switch or start the mode and not changing current target
values. This can be helpful if you want to switch from a running device mode (e.
g. cardio) to external control without setting a new target right now.
Parameters No parameters defined Syntax sample request:
*A12s0*Y0:71*Z Syntax sample response:
*A12s0*Y0:71*Z
[10Q] Stop
(Action index: 13) Stops external control mode and the device. Using this
action without external control permission will result in an error response (see
chapter “Safety considerations). “ControlAllowed” will be revoked after using
this action. Parameters No parameters defined
Syntax sample request: *A13s0*Y0:72*Z Syntax
sample response: *A13s0*Y0:72*Z
[10R]
SetPersonData (Action index: 14) Sets the current person data
of the individual that is using the device. These values will affect energy
consumption calculation and cardio default values. Using this action without
external control permission will result in an error response (see chapter
“Safety considerations”). Parameters
- Gender (direction in - index 0): ‘F’ = Female, ‘M’ = Male.
- Age (direction in - index 1, integer): age in years (1-150)
- Height (direction in - index 2, integer): 1 – 300 cm
- Weight (direction in – index 3): 1-300 kg Syntax sample
request (male, 26 years, 176 cm, 73 kg):
*A14s0*I0:M*I1:26*I2:176*I3:73*Y0:AA*Z Syntax sample response:
*A14s0*Y0:73*Z
[10S] GetPersonData
(Action index: 20) Gets the current person data of the individual that is
using the device. Parameters -
Gender (direction out - index 0): ‘F’ = Female, ‘M’ = Male.
- Age (direction out - index 1, integer): age in years (1-150)
- Height (direction out - index 2, integer): 1 – 300 cm
- Weight (direction out – index 3): 1-300 kg Syntax sample
request: *A20s0*Y0:70*Z Syntax sample response (male,
26 years, 176 cm, 73 kg):
*A20s0*O0:M*O1:26*O2:176*O3:73*Y0:BF*Z
[10T]
ResetCounterValues (Action index: 15) Resets current
parameters like time, distance, energy consumption, height. After using this
action these parameters will be set to 0 but continue counting. Using this
action without external control permission will result in an error response (see
chapter “Safety considerations”). Parameters No
parameters defined Syntax sample request: *A15s0*Y0:74*Z
Syntax sample response: *A15s0*Y0:74*Z
[10U] Beep (Action index: 19) Gives
external software a change to acoustical warn the user of load changes. You
should use this action in order to warn users before changing any load. Using
this action without external control permission will result in an error response
(see chapter “Safety considerations”). Parameters
- Duration (direction in – index 0, integer): Beep time in 1/100
seconds (0 to 2.55 s). Syntax sample request:
*A19s0*I0:100*Y0:E6*Z Syntax sample response:
*A19s0*Y0:78*Z
[11] Variables
h/p/cosmos coscom v4 defines one service with following variables:
Note: If no other description is given, values are defined as floating
point values expected with max. two decimal places and maximal value +/-
1.000.000. Integer values are defined as signed 32-bit values. String values
max.
[11A] ControlStatus
(Variable index: 0) Independent from which mode (Quickstart, Profile,
Cardio, Extern, Test) is running this variable indicates the current control
state. Possible values are: 0 = Stop (device is somewhere in menu)
1 = EmergencyStop 2 = Run 3 = Pause Pause is defined as
running belt and time counting is stopped. This can be achieved following:
- MCU5: Pressing the “-“ button or setting speed to 0 km/h till
running belt is stopped in all modes except stepper profile, test profile mode
and external control over coscom v4.
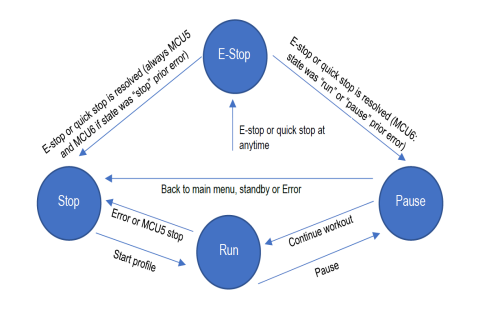
Figure 11: Control states of MCU6 device without active external control
- MCU6: Pressing the “Stop” button while in running mode. This will
switch in the summary screen which is interpreted as a pause before control is
finally stopped or continued. E-Stop
E-stop or quick stop at anytime Stop Back to
main menu, standby or Error Pause Run
Figure 10: Control states of MCU6 device without active external control
Syntax sample query request: *Q0s0*Y0:4E*Z Syntax
sample query response (Run state): *Q0s0:1*Y0:B9*Z
[11B] ControlAllowed (Variable index: 1)
Value that indicates if external control is allowed right now. Possible values
are: · 0 =
Allowed (control can be done by external software)
· 1 = RequestPending (User has yet to
decide if external software is allowed) ·
2 = NotAllowed (control is not allowed)
E-Stop (NotAllowed)) E-stop or quick stop at
anytime Stop (NotAllowed)
Start workout Stop Run (NotAllowed)
Continue workout Pause (NotAllowed)
Run (Allowed)
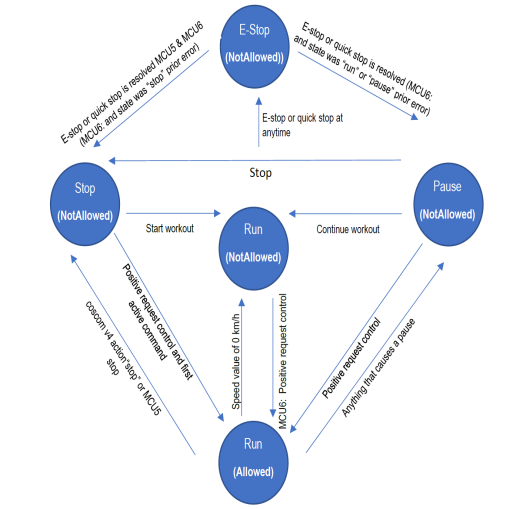
Figure 12: ControlAllowed
Syntax sample query request:
*Q1s0*Y0:4F*Z Syntax sample query response (request
pending): *Q1s0:1*Y0:BA*Z
[11C] ActualSpeed (Variable index: 2) Gets
the current speed value in m/s. Syntax sample query request:
*Q2s0*Y0:50*Z Syntax sample query response:
*Q2s0:2.10*Y0:4B*Z
[11D] TargetSpeed
(Variable index: 3) Gets the target speed value in m/s.
Syntax sample query request: *Q3s0*Y0:51*Z Syntax
sample query response: *Q3s0:3.50*Y0:51*Z
[11E] ActualElevation (Variable index: 4)
Gets the current elevation value in %. Syntax sample query request:
*Q4s0*Y0:52*Z Syntax sample query response:
*Q4s0:3.50*Y0:52*Z
[11F]
TargetElevation (Variable index: 5) Gets the target elevation
value in %. Syntax sample query request:
*Q5s0*Y0:53*Z Syntax sample query response:
*Q5s0:5.20*Y0:52*Z
[11G] ActualPower
(Variable index: 6, integer) Gets the current power value in watts.
Syntax sample query request: *Q6s0*Y0:54*Z Syntax
sample query response: *Q6s0:125*Y0:26*Z
[11H] TargetPower (Variable index: 7, integer)
Gets the target power value in watts. Syntax sample query request:
*Q7s0*Y0:55*Z Syntax sample query response:
*Q7s0:175*Y0:2C*Z
[11I]
ActualTorque (Variable index: 18) Gets the current torque
value in nm. Syntax sample query request:
*Q18s0*Y0:87*Z Syntax sample query response:
*Q18s0:6.30*Y0:88*Z
[11J]
TargetTorque (Variable index: 19) Gets the target torque
value in nm. Syntax sample query request:
*Q19s0*Y0:88*Z Syntax sample query response:
*Q19s0:6.50*Y0:8B*Z
[11K]
EnergyConsumption (Variable index: 8) Gets the energy
consumption of this workout in kj. Syntax sample query request:
*Q8s0*Y0:56*Z Syntax sample query response:
*Q8s0:213.23*Y0:B9*Z
[11L] MET
(Variable index: 9) Gets the current MET (metabolic equivalent) value of
this workout. Syntax sample query request:
*Q9s0*Y0:57*Z Syntax sample query response:
*Q9s0:85*Y0:FE*Z
[11M] Time
(Variable index: 10, integer) Gets the current workout time in seconds.
Syntax sample query request: *Q10s0*Y0:7F*Z
Syntax sample query response: *Q10s0:600*Y0:4F*Z
[11N] Distance (Variable index: 11) Gets
the current distance value of this workout in meters. Syntax sample
query request: *Q11s0*Y0:80*Z Syntax sample query
response: *Q11s0:10.25*Y0:B0*Z
[11O]
ActualCadence (Variable index: 12, integer) Gets the current
rotation frequency (RPM = rounds per minute). Syntax sample query
request: *Q12s0*Y0:81*Z Syntax sample query
response: *Q12s0:80*Y0:23*Z
[11P]
Height (Variable index: 13) Gets the current positive
altitude difference in meters which has been gathered in this workout. In case
of treadmill a negative value can be achieved if running direction is changed to
backwards running. Syntax sample query request:
*Q13s0*Y0:82*Z Syntax sample query response:
*Q13s0:235*Y0:56*Z
[11Q] HeartRate
(Variable index: 14, integer) Gets the current heart rate value of the
test person. If no heart rate is detected value will be 0. Syntax
sample query request: *Q14s0*Y0:83*Z Syntax
sample query response: *Q14s0:140*Y0:52*Z
[11R] RRInterval (Variable index: 15, integer)
Gets the latest RR-interval (beat-to-beat interval of the heart rate). This
variable should be monitored using events in order to get all value changes. If
RR-interval is not known (not supported or no heart rate available) the value
will be 0. Syntax sample query request:
*Q15s0*Y0:84*Z Syntax sample query response:
*Q15s0:862*Y0:5E*Z
[11S] Errors
(Variable index: 16, semicolon separated list of errors) Gets the current
error and service notes values of the device. If no error or service note is
active, string will be empty. Errors start with “E” followed by three digits.
Service notes start with “S” again followed by three digits e .g “E153” or
“S102”. Errors are defined in the user manual of the device. Syntax
sample query request: *Q16s0*Y0:85*Z Syntax
sample query response (errors 100 and 303):
*Q16s0:E100;E303*Y0:AB*Z
[11T]
StepHeight (Variable index: 20) Gets the current step height
in mm. Syntax sample query request:
*Q20s0*Y0:80*Z Syntax sample query response:
*Q20s0:203*Y0:4F*Z
[11U]
TargetCadence (Variable index: 21, integer) Gets the target
rotation frequency (RPM = rounds per minute). Syntax sample query
request: *Q21s0*Y0:81*Z Syntax sample query
response: *Q21s0:80*Y0:23*Z
[12]
Error Codes coscom v4 defines following error codes:
Code | Description |
111 | Internal error prevents external command (like no
connection to Frequency inverter) |
112 | Existing error prevents external command (device has
some active error, see device manual for possible errors) |
123 | Invalid Protocol parameter (e. g. missing
parameter in action message) | 133 |
External command is not allowed. See chapter Request control for
further information | 134 |
Elevation system is not referenced yet |
950 | Wrong or missing checksum |
999 | Function not supported by current device. This could
happen when using a function not supported for this device type
(see chapter feature matrix). |
[13]
MCU5 legacy device
h/p/cosmos introduced coscom v4 with the MCU6 device family in 2018. Older
devices with MCU5 can be updated (firmware version
1.08.3.0083 and higher) to use coscom v4 with some small limitations. As
MCU5 devices do have some display limitations it is not possible to show user
specific message when requesting control. Additional MCU5 devices will behave a
little different regarding control status (see variable) and request control
(see action).
[14] MCU5 coscom v4
Implementation Notes This section of the document describes the
implementation of the coscom v4 in the MCU 5 firmware. The MCU 5 firmware
implements only the device type “Treadmill” in the current version (1.08.3.0083
and higher). Communication settings The coscom v4
protocol uses a serial link according the RS-232 standard (19200, 8, n, 1). The
MCU 5
makes the coscom v4 protocol available on port COM1 with the setting
24 in option 20: [ 24] [COSC][OM 4]
How to
access to user options of MCU 5?
All User Options of MCU5 can be found in the
IFU Operation and Service Manual:
https://www.hpcosmos.com/sites/default/files/uploads/documents/manuals/20161130_cos14310m5-v1.08hpc-en_instructions_for_use_h-p-cosmos_treadmills.pdf
section 5.11: Optional settings: User Options, pages 76 … 82.
Manual for
para control 4.1 software:
https://www.hpcosmos.com/sites/default/files/uploads/documents/20220913_cos10071-v4.2man-en_manual_hpcosmos_para_control_4.2.pdf
Control requester
The coscom v4 specification defines a
procedure and the action “RequestControl” to get the
allowance to control
the treadmill.
This is a special additional safety feature in order to
re-confirm on the keyboard of the UserTerminal, that the patient or subject is
ready now and that the running belt may start now. This procedure shall avoid
that the treadmill belt will start (initiated by a command from external device
like PC, ECG, metabolic cart, etc.) while the patient or subject is not ready
yet.

The action “RequestControl” has the argument “Message”, which can be displayed
to retrieve the control decision from the user. The MCU 5 firmware ignores this
argument and always displays the following message: |
[PrES][S St][Art ] [For ][EXt ][CtrL] meaning. “press
start for external control” If this message is not
answered by a key press within 10 seconds, then the
message disappears and control requests are not allowed. The same happens,
if a key is pressed other than the Start key. After the
confirmation with the Start key and before the first control command the
display shows the following text: | |
[WAIt][ ][ ] [For ][Ext.][CtrL]
After the control command “Start” or “SetSpeed” the
text disappears and the device enters the manual mode. The event
variable “ControlAllowed” notifies the external device about the control
allowance status. The MCU 5 firmware uses the values “Allowed”,
“ControlAllowed“ and “NotAllowed“. The value
“TemporaryNotAllowed” is not possible with the MCU 5 firmware, because
there is no applicable state in the MCU 5 user interface model. |
Devices without UserTerminal (treadmill variant LT, which have no keyboard
and no display): There is a special treadmill variant (LT) without
a display head and without keyboard (UserTerminal).
This treadmill can only
be operated and controlled via a remote interface connection to a PC, ECG or
something similar.
With this configuration it would not be possible to
confirm an external control request with a key, because there are no displays
and no keys on such treadmills.
Therefore a special setting to “auto-confirm”
this request is necessary:
MCU5 treadmill:
Admin-Option 15 of the treadmill: 0 = Confirmation with key
“Start”
1 = Auto- Confirmation (LT variant, without UserTerminal = without
display and keyboard) How to access the admin options of MCU 5?
Ask h/p/cosmos service department:
service@hpcosmos.com
h/p/cosmos – coscom v4 Basic Remote Service
All Administrator Options of MCU5 can be found in the
IFU Operation and Service Manual:
https://www.hpcosmos.com/sites/default/files/uploads/documents/manuals/20161130_cos14310m5-v1.08hpc-en_instructions_for_use_h-p-cosmos_treadmills.pdf
section 10: Optional settings: administrator options, pages 148 … 158.
MCU6 treadmill: If manufacturer option “311 - Equipment Display” is set to
“no” request control will immediately be allowed without confirmation of the
user Safety and Validation For treadmills without
UserTerminal or for configurations where the “auto-confirm” setting (Admin
OP 15 parameter 1) is activated, the host device manufacturer (ECG, CPET,
PC-software, etc.) has to manage the risks to avoid unexpected starts and
dangerous situations by means of appropriate and validated procedures.
Such
a procedure could be an additional warning, request and confirmation in the host
control software.
Figure 13: Example for “request control” confirmation:
 |
CAUTION! The treadmill
will start now! Make sure the patient / subject holds the
handrails
and is ready for start to walk or run.
Use chest belt and safety
arch for fall prevention for all applications where a
fall would cause high risks to the patient / subject. |
 |
Next to the required technical tests and validation a quality assurance and
regulatory affairs agreement shall be signed and implemented between the
manufacturers of the treadmill and host devices such as ECG, CPET, PC-Software,
etc. in order to be in compliance with MDD, MDR, Risk Management ISO 14971 and
EN 62304 Software Lifecycle Processes. Example:
http://www.coscom.org/coscom_v4/20200930_cos100115-v4_hpcosmos_coscom_v4_quality_assurance_agreement_regulatory_affairs_en62304_en14971_sample.docx
Pause / Run and stopped belt There are two different states
in the MCU 5 firmware with a stopped belt:
1. The belt is stopped, the
display shows [PAUS] and the time is freezed.
coscom v4 ControlStatus = 3 = Pause
2. The belt is stopped, the display
shows [ 0.0] and the time is running. coscom v4
ControlStatus = 2 = Run Without coscom v4 control If the
speed is decreased to the value 0 either by pressing the key MINUS, another
control task or an external communication protocol command, then
Case 1.
(Pause) happens in the following situations:
• Manual, Profile or Cardio
mode is active
• Test mode is active and test is not covered by case 2.
Case 2. (Run) happens in the following situations:
• Test profile Stepper
• Other test profiles except user test profiles Bruce, Naughton, Balke, Ellestad
and test profiles 70 and higher
With coscom v4 control If the value of the status variable
ControlAllowed is “Allowed” only case 2 happens independent of the reason how
the speed is set to the value 0. At the same time the control status changes
from “Allowed” to “NotAllowed”.
The control status can be changed back to
“Allowed” if a new “RequestControl” is sent. Important:
the control status can only be changed back to “Allowed” while the belt is
stopped! Anomalies Some actions and variables are
not fully implemented as the specification defines. These are listed here:
Action SetElevationWithSpeed The action ignores the argument
“ElevationSpeed”, because the MCU 5 hardware cannot control the speed of the
elevation mechanism. Otherwise the behaviour of the action is like the action
“SetElevation”. Variable Height The variable “Height” is
not available in the MCU 5 firmware version, because it would be generating a
lot of computation load for an 8-bit microcontroller (integral, sine…).
[14] Interface cable In order to
connect your pc to a MCU 5 running machine you must use an interface cable which
is wired like in following picture:
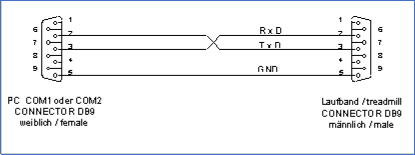
(h/p/cosmos order # cos00097010034)
For further information visit
https://www.hpcosmos.com/en/products/supplies-options/interface-
connection-cable-rs232-5m
USB RS232 converter / adapter:
If the PC / Laptop computer has no RS232 interface, use a compatible
USB-RS232 converter
(h/p/cosmos order # cos12769-01)
https://www.hpcosmos.com/en/products/supplies-options/usb-rs232-interface-adapter
[16] Extending h/p/cosmos coscom v4
If you want to extend coscom v4 with vendor specific extensions (new actions or
variables) this must be placed in an extra service. In order to avoid
collisions, the indices are assigned by h/p/cosmos. Please contact:
andreas.feil@hpcosmos.com
[17]
Updates, downloads, simulators, regulatory affairs and publications
See website:
http://www.coscom.org
Quality Assurance Agreements and Regulatory Affairs Agreements must be agreed
among all parties involved. As h/p/cosmos at
service@hpcosmos.com
for a single page draft agreement.
© Copyright 2020-2024 h/p/cosmos sports &
medical gmbh
E & OE.
Errors and Omissions Excepted.
Subject to
alterations without prior notice.
Attachment: h/p/cosmos – coscom v4 Basic Remote Service
How to access to admin options of MCU 5?
Ask h/p/cosmos service department:
service@hpcosmos.com
a) Download h/p/cosmos
para control 4.2 PC software and install on an PC or Laptop:
https://www.hpcosmos.com/sites/default/files/uploads/documents/20220113_cos10071-v4_2_0-txt_hpcosmos_paracontrol_setup_full_en_1.zip
b) Connect the PC or Laptop computer to COM 3 (service port) of the h/p/cosmos
treadmill via
RS232
interface cable (h/p/cosmos order # cos00097010034)


If the PC / Laptop computer has no RS232 interface, use a compatible
USB-RS232 converter
(h/p/cosmos order # cos12769-01)
USB - RS232
converter must have Chipset FTDI / FT232RL and Full Duplex Interface!
https://www.hpcosmos.com/en/products/supplies-options/usb-rs232-interface-adapter
c) Enter “access code” for admin options:

If you are software developer please contact service@hpcosmos.com and ask for
the admin access code. This access code is confidential and must not be
disclosed to normal customers and/ or operators of the devices for safety
reasons.

All Administrator Options of MCU5 can be found in the
IFU Operation and Service Manual:
https://www.hpcosmos.com/sites/default/files/uploads/documents/manuals/20161130_cos14310m5-v1.08hpc-en_instructions_for_use_h-p-cosmos_treadmills.pdf
section 10: Optional settings: administrator options, pages 148 … 158.
Manual for para control 4.2 software:
https://www.hpcosmos.com/sites/default/files/uploads/documents/20220913_cos10071-v4.2man-en_manual_hpcosmos_para_control_4.2.pdf
Warning! The administrator options are only accessible by h/p/cosmos staff
and authorized service engineers. Changing an administrator option might cause
serious problems if you are not familiar with all the details. Therefore, the
h/p/cosmos service has to be contacted before doing any changes in the
administrator options.
Forwarding the access code to unauthorized
persons is prohibited.
confidential, for internal use only
 Comparison of some interface protocol features, performance and safety standard.
Comparison of some interface protocol features, performance and safety standard.
 Schnittstellenprotokoll-Vergleich einiger Funktionen, Leistungsdaten und
Sicherheitsstandards.
Schnittstellenprotokoll-Vergleich einiger Funktionen, Leistungsdaten und
Sicherheitsstandards.
features and functions | h/p/cosmos®
coscom® v3 | h/p/cosmos®
coscom® v4 | Trackmaster
(TMX 425, 28/03/2003) | baudrate |
9600 or 115200 bps 9600 oder 115200 bps |
19200 bps 19200 bps | 4800 bps
4800 bps | Encoding
Zeichencodierung | UTF-8 UTF-8 |
UTF-8 UTF-8 | Mixture of binary and ASCII
Mischung aus binär und ASCII | message
length Nachrichtenlänge | Variable, but
longer than Trackmaster, since more parameters are possible in one
message. Variabel aber länger als Trackmaster, da
mehrere Parameter in einer Nachricht möglich sind. |
Variable, but longer than Trackmaster, since more parameters are
possible in one message. Variabel aber länger als
Trackmaster, da mehrere Parameter in einer Nachricht
möglich sind. | Variable, but max. 5 bytes. Limitation to
functional code and one parameter. Variabel aber max.
5 Bytes. Beschränkung auf Funktionscode und einen
Parameter. | scope of functions
Funktionsumfang | Great scope of functions (speed and
elevation control, acceleration levels, failsafe, heart rate,
optional functions, profiles, displays, beeper, etc.)
Großer Funktionsumfang (Geschwindigkeits- und Steigungsverstellung,
Beschleunigungsstufen, Failsafe, Herzfrequenz, Optionen, Profile,
Displays, Beeper, usw…) | Reduced but more clearly
structured scope of functions compared to coscom v3 (speed and
elevation control, acceleration levels, failsafe, heart rate, beeper,
etc.). Also supports other types like bicycle ergometers.
Reduzierter aber übersichtlicherer Funktionsumfang (Geschwindigkeits-
und Steigungsverstellung, Beschleunigungsstufen, Failsafe, Herzfrequenz,
Beeper, usw…). Unterstützt auch andere Typen wie Fahrradergometer |
Basically speed and elevation control and failsafe. A few other commands
exist, but are not executed, at least at the TMX 425 treadmill
model. Im Wesentlichen Speed und Elevation Control und
Failsafe. Ein paar andere Befehle existieren, werden aber nicht
ausgeführt -zumindest bei TMX 425 Laufband. |
resolution for elevation Auflösung Steigungswinkel |
can be set to 0.1 % resolution auf 0.1 % genau |
can be set to 0.1 % resolution auf 0.1 % genau |
can be set to 0.5 % resolution auf 0.5 % genau |
Messages Benachrichtigungen | Device
sends status changes on request. Geräte verschickt auf
Wunsch Statusänderungen. | Device sends status changes on
request. Geräte verschickt auf Wunsch
Statusänderungen. | Status changes always have to be
requested (polling). Statusänderungen müssen immer abgefragt
(gepollt) werden. | Acknowledgements
Acknowledgements | Positive and negative (error messages)
Positiv und negativ (Fehlernachrichten) | Positive and
negative (error messages) Positiv und negativ
(Fehlernachrichten) | No negative replies (error messages);
only positive acknowledgements Keine Fehlerantworten (nur positive
Acknowledgements) |
confidential, for
internal use only
features and functions | h/p/cosmos®
coscom® v3 | h/p/cosmos®
coscom® v4 | Trackmaster
(TMX 425, 28/03/2003) | Failsafe
Failsafe | Optional. Setting variable (recommendation 1
second). Expiry is detectable via request. Optional.
Einstellung variabel (Empfehlung 1 Sekunde). Ablauf
kann über Abfrage festgestellt werden. | Mandatory. Using
action for active control required. Expiry is detectable via request.
For passive control (read only) no failsafe is needed.
Zwingend: Verwendung für aktive Steuerung vorgeschrieben. Ablauf kann
über Action festgestellt werden. Für passive Steuerung (lesend) ist kein
Failsafe notwendig. | Optional possible. Presetting 0.5
seconds (latest MCU5 implementation: 2 seconds). Expiry is not
transmitted. Optional möglich. Vorgabe 0.5 Sekunden
(aktuelle MCU5 Implementierung zwei Sekunden). Ablauf wird nicht
übermittelt. | Checksum |
Optional. A message checksum can be activated
Optional. Eine Prüfsumme für Nachrichten kann eingeschaltet werden. |
Mandatory. A message checksum must be used. Zwingend:
Die Verwendung der Prüfsumme für Nachrichten ist
vorgeschrieben. | No actual checksum. Echo of received
commands optionally possible. Keine Prüfsumme. Echo
von empfangenen Kommandos optional möglich. |
Request control | Not available Nicht
verfügbar | Active external control must request control
before sending new commands like setting speed value. Auto-confirm
see chapter „control requester“ Aktive externe
Steuerungen müssen um Erlaubnis fragen, bevor extern gesteuert werden
kann. Auto- confirm – siehe Kapitel „control requester“ |
Not available. Nicht verfügbar. |
IEC 62304 / ISO 14971 | Can be implemented in own projects.
Kann in eigenen Projekten implementiert werden. | Can be
implemented in own projects. Kann in eigenen Projekten
implementiert werden. | unknown unbekannt |
free DLL download and publication |
available on
www.coscom.org
with valuable controls and objects
erhältlich auf
www.coscom.org |
No release version
available yet, but coming soon.
Betaversion V1.0.0.0 available
20201012_hpcosmos_betaversion_test_1.0.0.0_coscom_v4_dll.zip
20201012_hpcosmos_betaversion_test_1.0.0.0_coscom_v4_Tutorial.zip | unknown
unbekannt | Firmware update and
programming functions and features for treadmill MCU MicroControllerUnit |
MCU5 | no firmware update via USB | no |
free Windows PC software for remote control and
maintenance kostenlose PC Software für Fernsteuerung und Wartung |
para control 4.1
https://www.hpcosmos.com/en/products/software | para
control 6 is under development | unknown |
confidential, for internal use onlySummary: 1. The
h/p/cosmos coscom v4 is an enhancement to coscom v3 especially in terms of
safety. 2. coscom v4 is much more simple in it’s architecture compared to
coscom v3, because all special features (like firmware update and programming
features) remain in coscom v3. 3. It significantly reduces the needed
documentation and training time. 4. Important standards / norms like EN
62304 Software Lifecycle Processes for medical devices and ISO 14971 Risk
Management can be achieved in your projects with coscom v3 and coscom v4.
5. The coscom .net objects for coscom v3 are a great help for programmers to
implement sophisticated functions with minor effort. 6. coscom v3 allow
the use of the free PC software para control, so the treadmills and ergometers
can be remote controlled and programmed via external PC or laptop and also
important features like firmware update, error diagnostics, resets, etc can be
performed via the external h/p/cosmos Windows software para control. 7.
All h/p/cosmos and h/p/cosmos OEM treadmills with MCU5 from manufacturing date
2019 are equipped with coscom v3 and additionally with coscom v4.
8. Update your ECG, VO2max and CPET devices and other equipment and software to
coscom v4 in time, because due to MDR regulatory affairs and technology reasons
all new MCU6 UserTerminals with TouchScreen launched from the
year 2020 for treadmills and ergometers will not have coscom v3 and Trackmaster
or other protocols included any more, but only coscom v4.
Zusammenfassung: 1. Das h/p/cosmos coscom v4 ist eine
konsequente Weiterentwicklung von coscom v3 speziell in Punkto Sicherheit.
2. coscom v4 ist viel einfacher in der Architektur im Vergleich zu coscom v3,
weil alle speziellen Funktionen (wie z.B. Firmware update und
Programmierfunktionen) in coscom v3 verbleiben. 3. Es
reduziert den Dokumentationsumfang und die Einarbeitungszeit erheblich.
4. Einhaltung wichtiger Normen wie EN62304 Software Lebenszyklus Prozesse für
Medizinprodukte und Risikomanagement nach EN14971 sind mit coscom v3 und coscom
v4 in ihren Projekten möglich. 5. Die coscom .net objects für coscom
v3 sind eine grosse Hilfe für Programmierer um moderne Funktionen ohne grossen
Aufwand zu implementieren. 6. coscom v3 ermöglichen die Nutzung
der kostenlose PC Software para control, mit der Laufbänder und Ergometer über
externen PC oder Laptop ferngesteuert und programmiert werden können und weitere
wichtige Funktionen wie Firmware Updates, Fehlerdiagnose, Resets, etc, über
diese externe Windows Software para control ermöglichen.
7. Alle h/p/cosmos und h/p/cosmos OEM Laufbänder mit MCU5 ab Baujahr 2019 sind
sowohl mit coscom v3 als auch zusätzlich mit coscom v4 ausgestattet.
8. Updaten Sie Ihre EKGs, VO2max und CPET Systeme sowie andere Geräte und
Software zeitnahe auf coscom v4, weil aufgrund MDR und Regulatorischen
Anforderungen sowie aus technologischen Gründen alle neuen MCU6 UserTerminals
mit TouchScreen produziert ab dem Jahr 2020 für Laufbänder und Ergometers nicht
mehr mit coscom v3 und Trackmaster oder anderen Schnittstellen-Protokollen
ausgestattet sein werden, sondern nur noch mit coscom v4.
|